Miniature Matchbox Robot with STM32
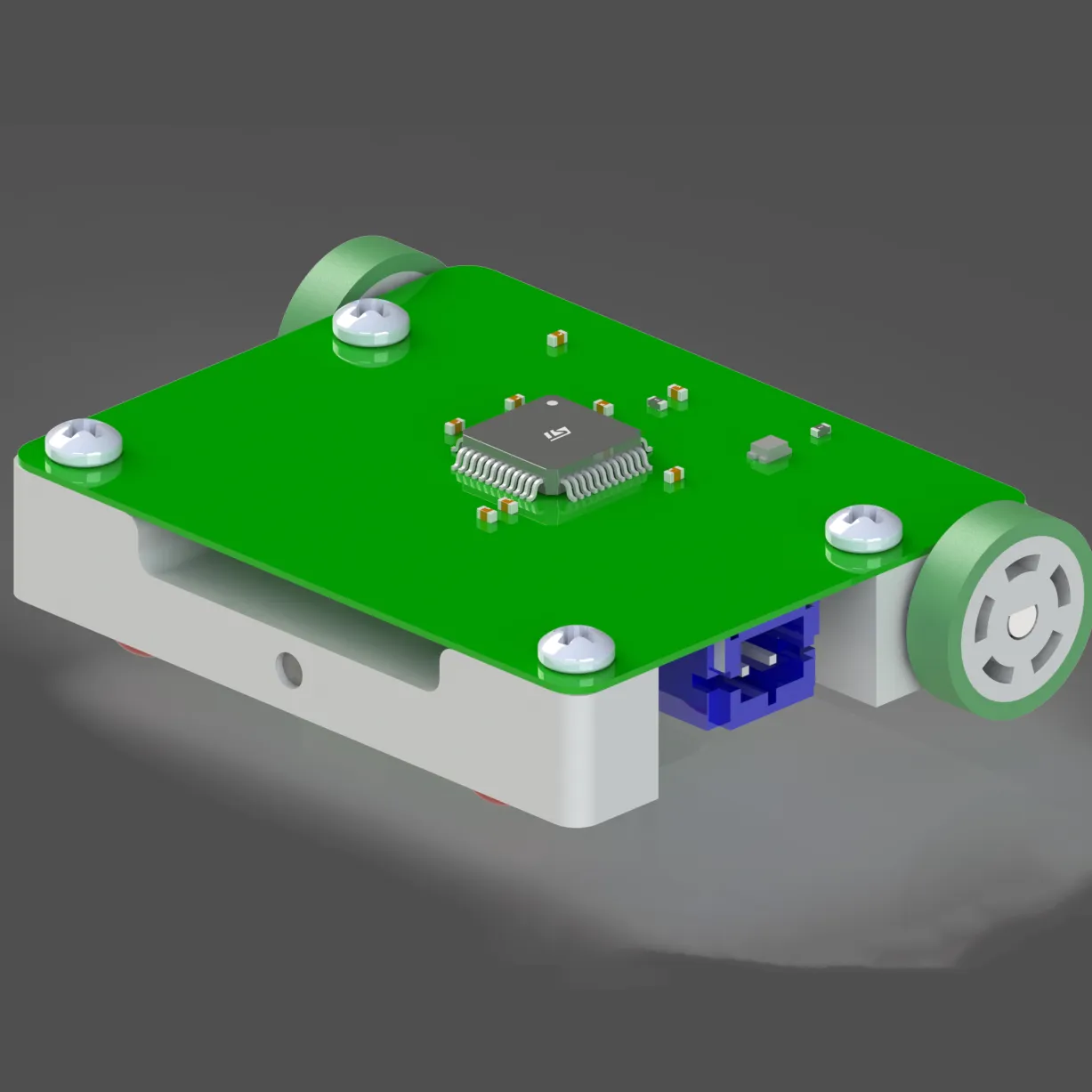
The matchbox robot was a university team project, requiring the development of a small-scale robot to collect and deposit marbles by colour in a time limit. The challenging specification was the size, requiring it to fit with a WxLxH of 35x50x12.5mm for incorporating the circuitry, wires, drive system, power supply and collection mechanism.
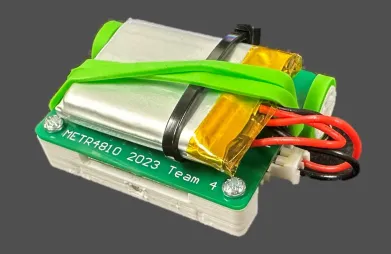
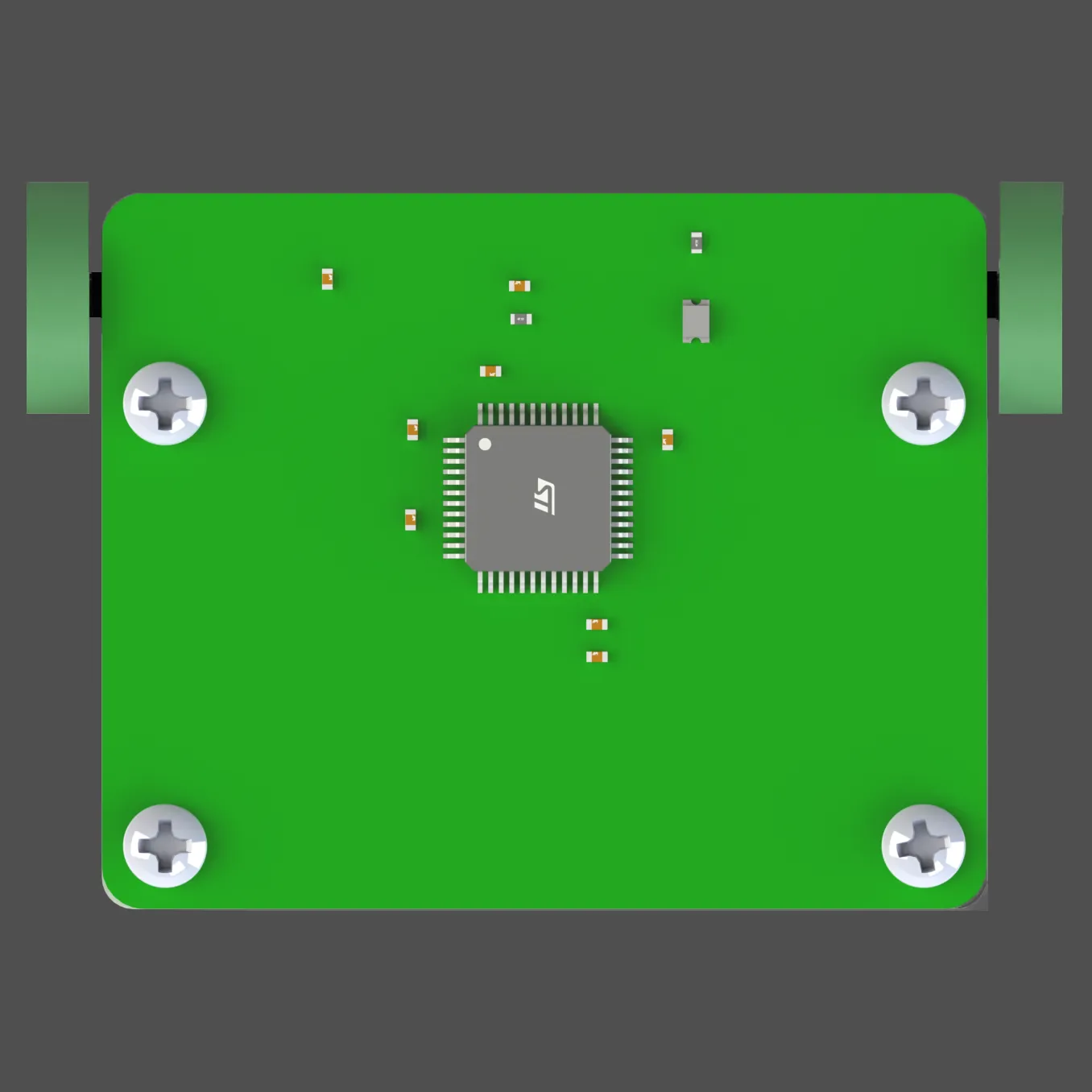
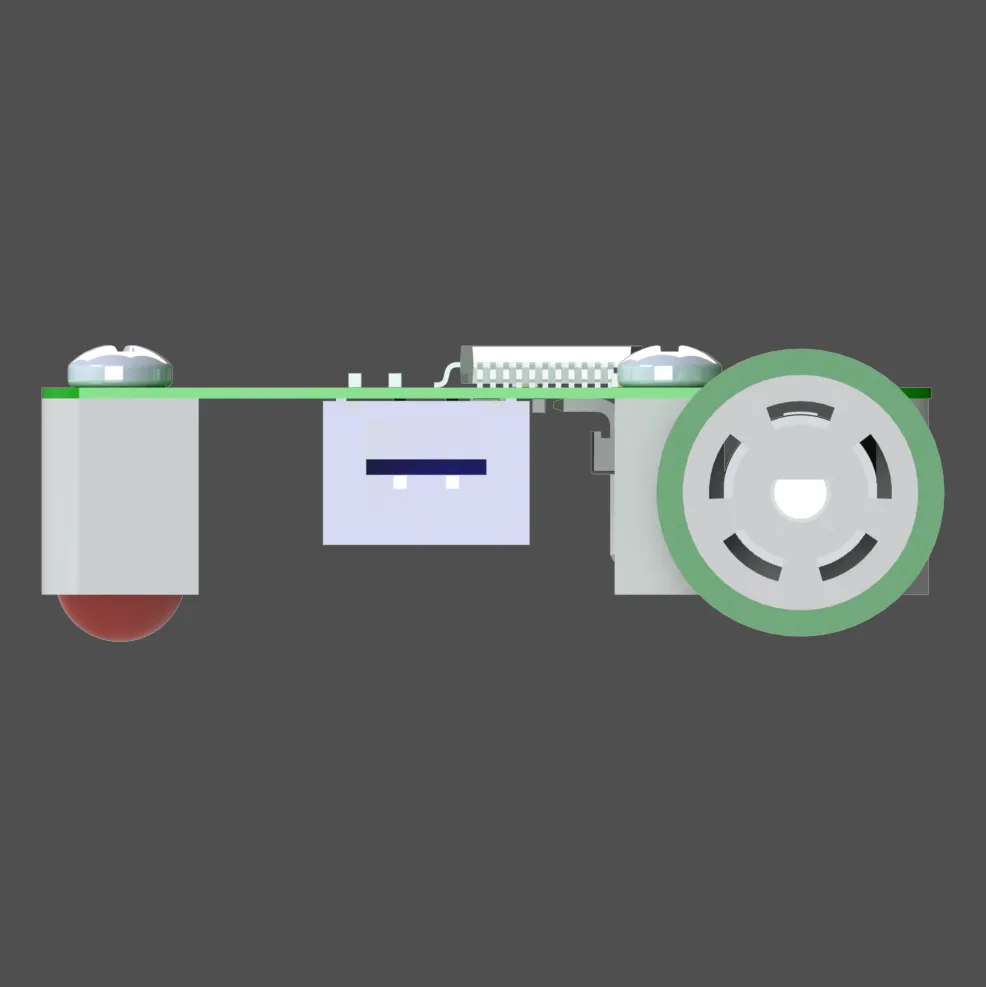
The robot was designed in Solidworks, and the chassis was 3D printed. The robot was controlled by an STM32 microcontroller, with a custom PCB designed to fit the size constraints. The robot was powered by a 3.7V LiPo battery, with the drive system a pair of 3V DC motors with an inbuilt gear system. The collection mechanism used a magnet to attract the marbles (simulated with ball bearings) which were embedded into a 3D printed chassis.
The infrared controller was a bootstrapped controller from an off-the-shelf product. It had a non-standard protocol, requiring me to develop a custom decoding function to map each control action to an action on our vehicle. This was viable as there was a finite number of actions available.