Autonomous minesweeper with Arduino
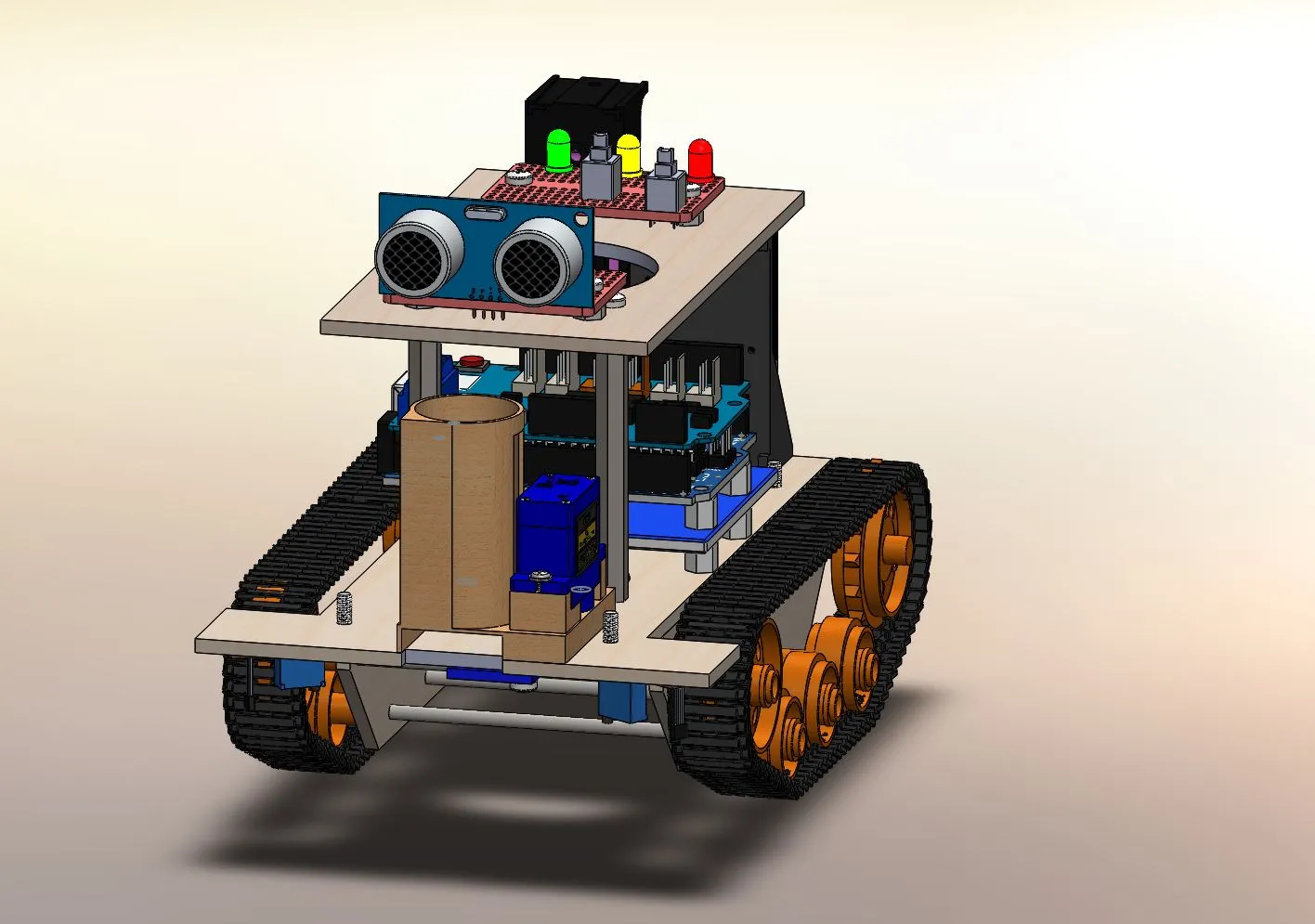
This was a first-year university project, stipulating the design of a fully autonomous vehicle to detect and mark landmines simulated using magnets in a hostile arena. Of this, I was responsible primarily for the overall design and integrating the actuators and sensors into the vehicle. The vehicle was designed in Solidworks, with an Arduino and motorshield used for the drivetrain. Tracks were used as the locomotive due to the rough terrain, with a fibreboard chassis to house the electronics. The vehicle was powered by a 19650 LiPo battery, with a 9V battery used for the Arduino.
Ultrasonic sensors were mounted on the front of the vehicle to provide direction, and a Hall effect sensor used to detect the mines mounted underneath the chassis. The dispensing mechanism utilised a servo motor to push markers onto designated locations. The vehicle was programmed in C++ using the Arduino IDE, with the ultrasonic sensors used to detect the walls of the arena and the Hall effect sensor used to detect the mines. The vehicle was programmed to move in a straight line until it detected a wall, at which point it would turn 90 degrees and continue. If a mine was detected, the vehicle would stop and dispense a marker.