Autonomous Infrared Vehicle with Turret
The autonomous turret was a mechatronics design project for unversity. The challenge was to design an autonomous which can navigate to a predefined region before firing infrared signals at targets positioned at distance. Our solution used a tri-wheel design with a simple gearbox, an array of infrared sensors to detect the targets, and a servo-actuated turret to fire the infrared signals to meet the height.
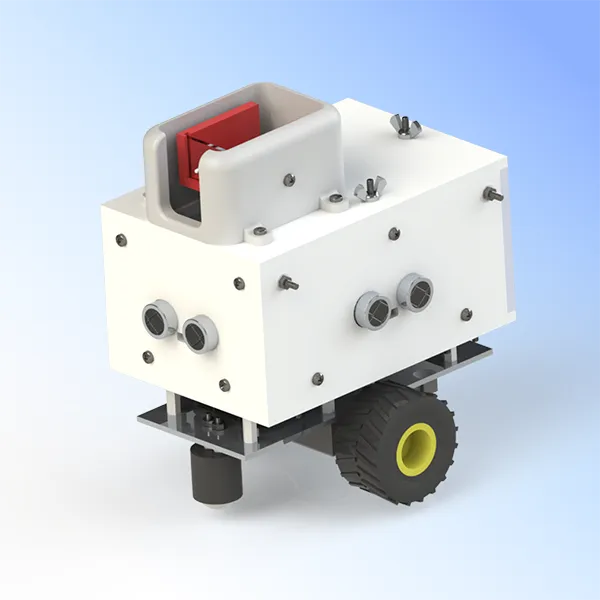
The body was designed in Solidworks and built entirely out of acrylic with 3D printed mounted. This was to improve the speed at which the robot could be built. Ultrasonic sensors were mounted on the front and side, as the robot needed to navigate to the centre of a square. Once in position, it pivoted about the rear wheels in a circle to locate the targets positioned outside the arena at various heights and distances.
The infrared transmitter was positioned between the array of sensors. Once it had locked into a high signal, it would actuate this turret vertically before firing at a triangulated position of maximum signal. The robot was programmed in C with a custom-made circuit board mounted inside the chassis, powered by 6 AA batteries.